Robot đã có thể thực hiện các cú nhào lộn trên không một cách hoàn hảo
Sử dụng kỹ thuật học máy, các nhà nghiên cứu từ đại học California của Mỹ đã dạy các robot mô phỏng con người thực hiện hơn 25 chuyển động tự nhiên, từ nhào lộn cho đến các cú đá cao và các điệu nhảy đường phố. Kỹ thuật này có thể mở đường cho các trò chơi video thực tế hơn và các robot nhanh nhẹn hơn.
Hoạt hình mô phỏng bằng máy tính chưa bao giờ tốt hơn thế, nhưng vẫn còn rất nhiều cơ hội để cải tiến. Chúng ta vẫn phân biệt được đâu là hình ảnh mô phỏng, đâu là hình ảnh thật. Và đây chính là nơi có thể cải tiến, chúng ta có thể trang bị cho các nhân vật ảo bằng những diện mạo và chuyển động tự nhiên đến mức thật ảo lẫn lộn, không thể phân biệt.
Để đạt được mục đích đó, Xue Bin "Jason" Peng, sinh viên tốt nghiệp đại học Đại học California cùng với các đồng nghiệp, đã kết hợp hai kỹ thuật - công nghệ ghi hình chuyển động và học máy nâng cao - để tạo ra một cái gì đó hoàn toàn mới: một hệ thống dạy robot thực hiện các động tác thể chất phức tạp theo một cách thực tế hơn. Học từ đầu, và với can thiệp hạn chế của con người, các nhân vật kỹ thuật số đã học được cách đá, nhảy và lộn nhào. Hơn nữa, các nhân vật này thậm chí học được cách tương tác với các vật thể trong môi trường của mình, chẳng hạn như rào cản được đặt vào đường đi của hoặc vật thể được ném trực tiếp về phía mình.
Thông thường, các nhà làm phim hoạt hình máy tính phải tự tạo bộ điều khiển tùy chỉnh cho mọi kỹ năng hoặc động tác. Những bộ điều khiển này khá chi tiết, và bao gồm các kỹ năng rời rạc như đi bộ, chạy bộ, lộn nhào, hoặc bất cứ điều gì nhân vật cần phải thực hiện. Các chuyển động được tạo ra bằng kỹ thuật này trông khá đẹp mắt, nhưng mỗi chuyển động phải được tự tạo bằng tay. Cách tiếp cận khác là sử dụng các phương pháp học nâng cao, chẳng hạn như kỹ thuật GAIL của trí tuệ nhân tạo DeepMind. Kỹ thuật này rất ấn tượng vì robot học cách làm mọi việc từ đầu - nhưng thường tạo ra kết quả kỳ quặc, không thể đoán trước, và không tự nhiên.
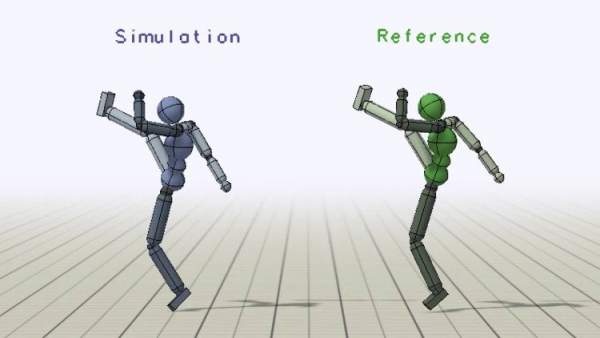
Hệ thống mới, được gọi là DeepMimic, hoạt động hơi khác một chút. Thay vì buộc nhân vật mô phỏng đạt được một mục đích cuối cùng cụ thể, chẳng hạn như đi bộ, DeepMimic sử dụng các clip ghi hình chuyển động để "phô" ra cho AI thấy mục tiêu cuối cùng trông như thế nào. Trong các thí nghiệm, nhóm nghiên cứu của Bin đã lấy dữ liệu ghi hình chuyển động từ hơn 25 kỹ năng thể chất khác nhau, từ chạy bộ, ném lao đến nhảy và lộn nhào, để "xác định phong cách và diện mạo mong muốn" của kỹ năng, như Peng giải thích trên blog của Trung tâm Nghiên cứu Trí tuệ Nhân tạo Berkeley (BAIR).
Kết quả không có được ngay sau một đêm. Các nhân vật ảo trượt và ngã xấp mặt nhiều lần cho đến khi cuối cùng cũng thực hiện đúng các chuyển động. Phải mất một tháng để phát triển mỗi kỹ năng "thực hành" mô phỏng, khi mà các robot đã trải qua hàng triệu lần thử nghiệm nhằm cố gắng hoàn thiện các cú lộn nhào trên không hoặc cú đá cao. Nhưng mỗi thất bại là một lần điều chỉnh giúp robot đến gần hơn với mục tiêu mong muốn.
Bằng cách sử dụng kỹ thuật này, các nhà nghiên cứu đã có thể tạo ra các nhân vật cư xử một cách thực tế, tự nhiên. Nổi bật nhất, các robot có thể xoay xở trong các hoàn cảnh chưa gặp bao giờ, chẳng hạn như địa hình thách thức hoặc chướng ngại vật. Đây là phần thưởng bổ sung cho việc học nâng cao, chứ không phải là điều mà các nhà nghiên cứu cố gắng đạt được.

Nền tảng này có thể được sử dụng để sản xuất hoạt hình máy tính thực tế hơn, nhưng cũng để thử nghiệm robot.
"Chúng tôi đưa ra khung khái niệm [học tập nâng cao] đơn giản, cho phép nhân vật mô phỏng học được các kỹ năng động và nhào lộn từ các clip chuyển động tham chiếu, có thể được cung cấp ở dạng dữ liệu ghi hình chuyển động được ghi lại từ các đối tượng con người", Peng cho biết. "Với một kỹ năng duy nhất, chẳng hạn như một cú đá hiểm hoặc cú lộn nhào trên không, nhân vật của chúng tôi có thể học để bắt chước kỹ năng mô phỏng. Cách này giúp tạo ra những chuyển động gần như không thể phân biệt được với chuyển động được ghi hình. Chúng tôi đang hướng tới việc tạo ra một diễn viên đóng thể ảo".
Các nhà nghiên cứu cũng đã sử dụng DeepMimic để tạo ra các chuyển động thực tế từ sư tử, khủng long, và các quái thú thần thoại. Họ thậm chí đã tạo ra một phiên bản ảo của ATLAS, robot con người được bình chọn là có khả năng nhất để tiêu diệt nhân loại. Nền tảng này có thể được sử dụng để sản xuất hoạt hình máy tính thực tế hơn, nhưng cũng để thử nghiệm robot.
Công trình sẽ được trình bày tại hội nghị về đồ họa máy tính và công nghệ tương tác SIGGRAPH 2018 tháng 8 năm nay.
Nguồn tin: eneoia.com
Ý kiến bạn đọc
Những tin mới hơn
Những tin cũ hơn
ĐC: 10 Phan Anh, Tam Kỳ, Q.Nam
duoc lieu quang nam; duoc lieu quy quang nam; nông nghiệp tiên phong ; nong nghiep tien phong, sam quang nam ; sam ngoc linh quang nam ; bao hiem xa hoi ; bhxh ; phuoc sam; phước sâm; phước dược liệu quảng nam; hợp tác xã tiên phong;